NexCOBOT Taiwan
13F, No.916, Zhongzheng Rd., Zhonghe Dist., New Taipei City, Taiwan 23586, R.O.C.
TEL: +886-2-8226-7786
創博提供NexGRC, 一站式機器人控制軟體解決方案, 支援市面常見八大種類機器人, 不僅可滿足生產線上多種類機器人控制需求, 亦可實現機器人的不同應用, 如加工、焊接、切割等。面對繁瑣的機器人參數設定, NexGRC 提供豐富調試軟體, 讓使用者可快速設定機器人系統, 化繁為簡, 立刻上線!
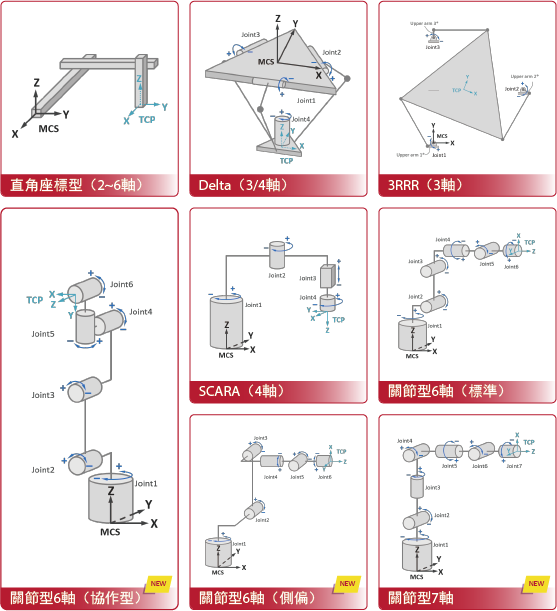
NexGRC 支援機器人構型
NexGRC 調試軟體
♦ NexMotion Studio
大幅縮短設定調適時間
設定到控制只需要10分鐘♦ NexTPUI
專為應用現場設計,進行機器人校點、編程
機器人新構型詳解: ARU6 type, AR7 type, ARS6 type
♦ ARU6 type (6-axis關節協作型機器人)
ARU6 type (6-axis關節協作型機器人)其馬達機構配置如圖所示,此構型機器人可提供三維空間中的六個自由度運動。此構型機器人多為協作型如優傲機器人或達明機器人。
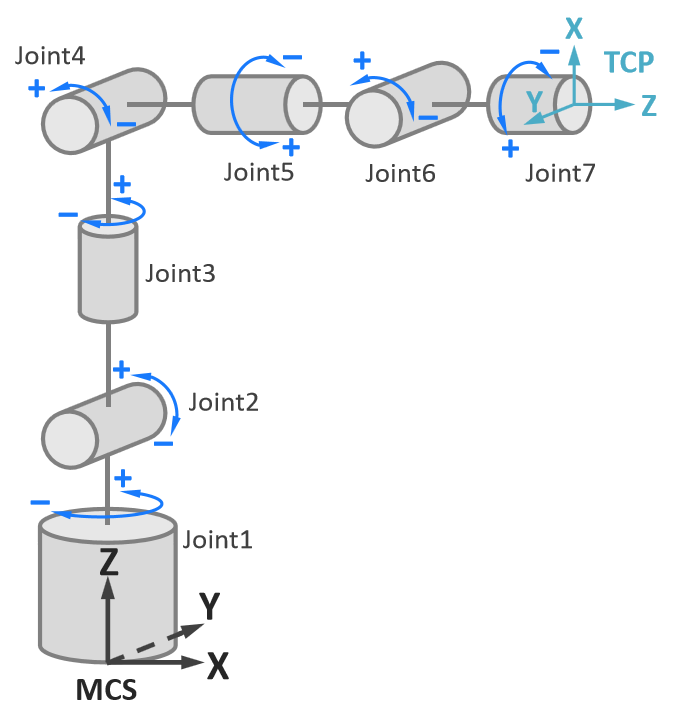
♦ AR7 type (7-axis關節型機器人)
AR7 type (7-axis關節型機器人)其馬達機構配置如圖所示,此構型可提供機器人在三維空間中有六個自由度和一個冗餘自由度的運動,以適用於狹窄空間及有障礙物的工作環境。
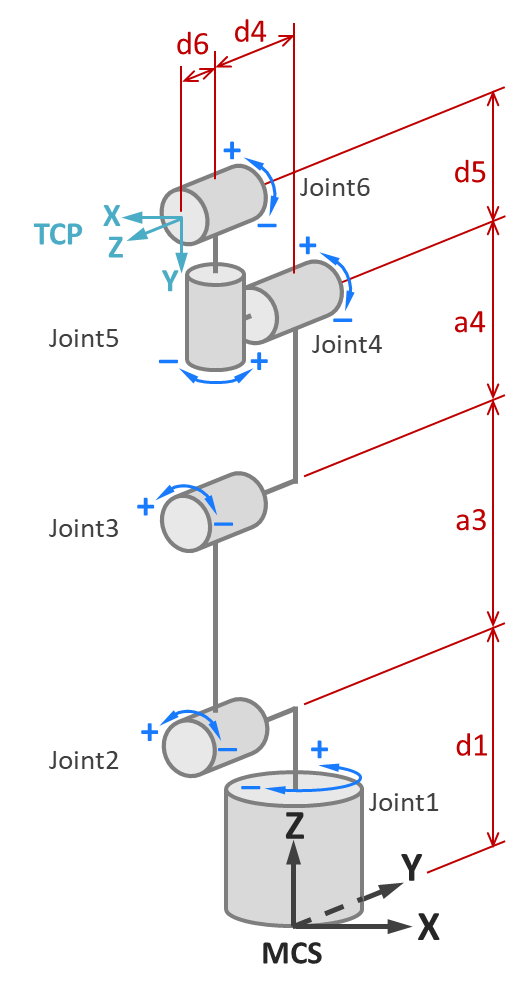
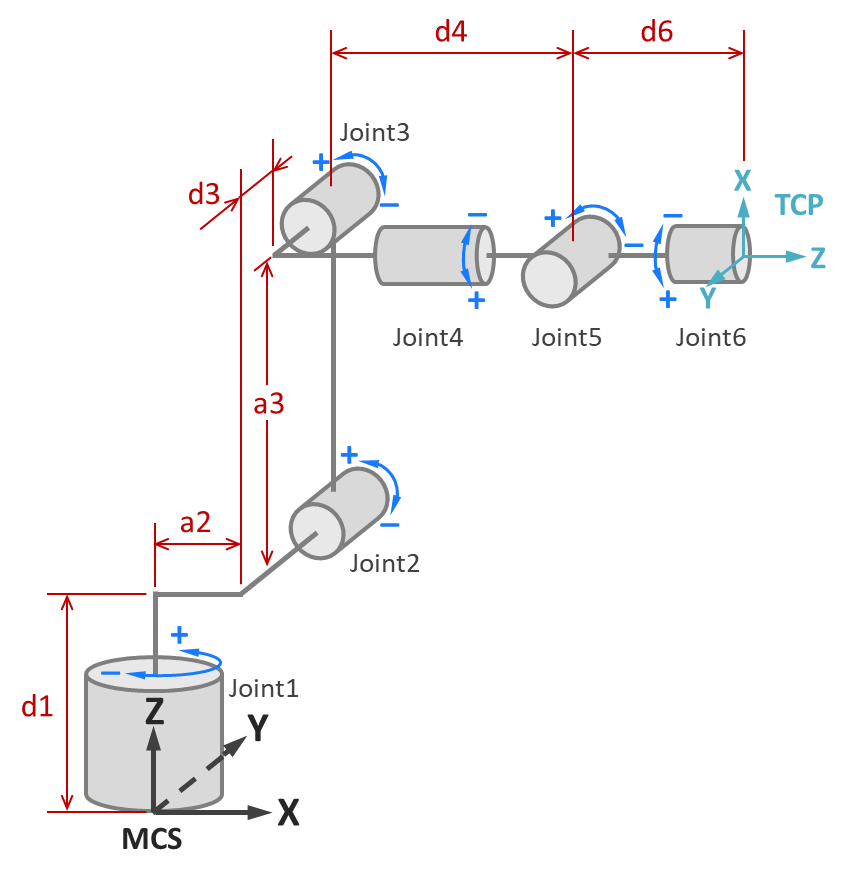
♦ ARS6 type (6-axis關節型機器人)
ARS6 type (6-axis關節型機器人)其馬達機構配置與運動學參數如圖所示,此構型機器人可提供三維空間中的六個自由度運動。和AR6 type不同處在於:
1. Joint1和Joint2之間多了可以設定的側偏(d3)
2. Joint3和Joint4少了向上的偏移(a3)
參考機器人構型如: 史陶比爾(Stäubli)機器人